5 Motor control (MCTRL)
5.7 Sensorless vector control (SLVC)
202
Lenze · 8400 HighLine · Reference manual · DMS 12.0 EN · 06/2017 · TD23
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
5.7.4.5 Optimise response to setpoint changes and determine mass inertia
Optimisation at constant mass inertia
Setting the total moment of inertia under C00273
provides the optimum torque feedforward
control. Depending on the application, an adjustment of the setting under C00273
may be
necessary to optimise the response to position/speed setpoint changes by means of the torque
feedforward control.
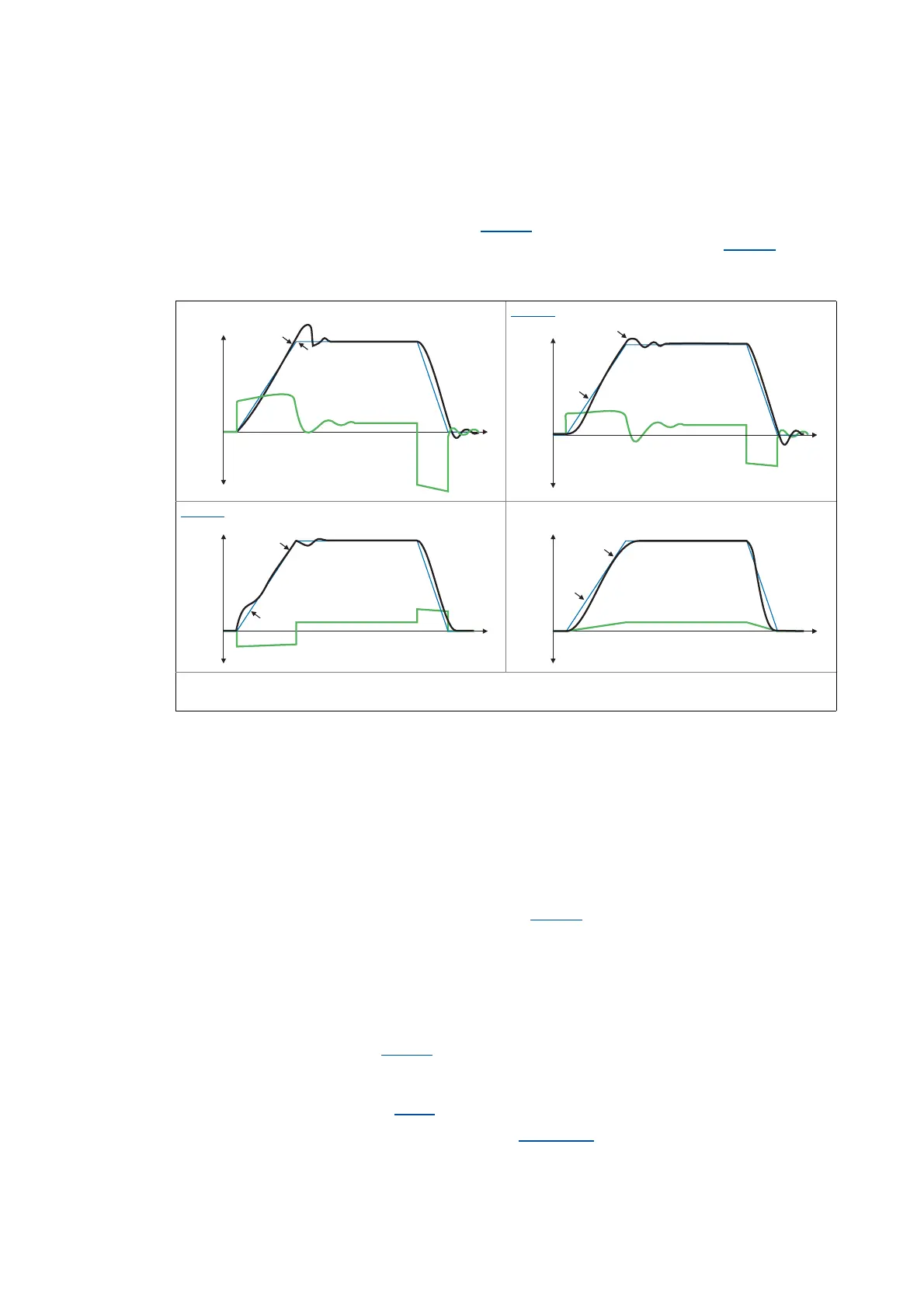
[5-12] Typical signal characteristics for different settings of the load moment of inertia
How to optimise the torque feedforward control:
1. Run a typical speed profile and record the inputs and outputs of the speed controller with
the data logger.
• Motor control variables to be recorded:
nSpeedSetValue_a (speed setpoint)
nMotorSpeedAct_a (actual speed value)
nOutputSpeedCtrl_a (speed controller output)
2. Estimate the moment of inertia and set it in C00273
in relation to the motor end (i.e. with
account being taken of the gearbox factors).
3. Repeat the data logger recording (see step 1).
Now the data logger should show that part of the required torque is generated by the
feedforward control and the speed controller output signal (nOutputSpeedCtrl_a) is
correspondingly smaller. The resulting following error decreases.
4. Change the setting in C00273
and repeat the data logger recording until the intended
response to setpoint changes is reached.
• The optimisation could aim at the speed controller being completely relieved (see signal
characteristics in Fig. [5-12]
).
5. Save the parameter set (device command: C00002/11
).
Without feedforward control: C00273 set too low:
C00273
set too high: Optimum feedforward control:
Actual speed value (signal nMotorSpeedAct_a) Speed controller output (signal nOutputSpeedCtrl_a)
Speed setpoint (nSpeedSetValue_a signal)

 Loading...
Loading...








